Tangima
Tangima is a physical inteface capable of breaking the two-dimensional barrier of images. The positioning and depth information captured by Kinect generate real-time motion of mechanical pixels composed of servo motors and acrylic. The volumetric display is also capable of representing audio information and pre-determined modes of movement (waves).
My contribution
In this project, I helped in the construction of acrylic boxes, servo assembly, wiring leds and support for future exhibition.
Process
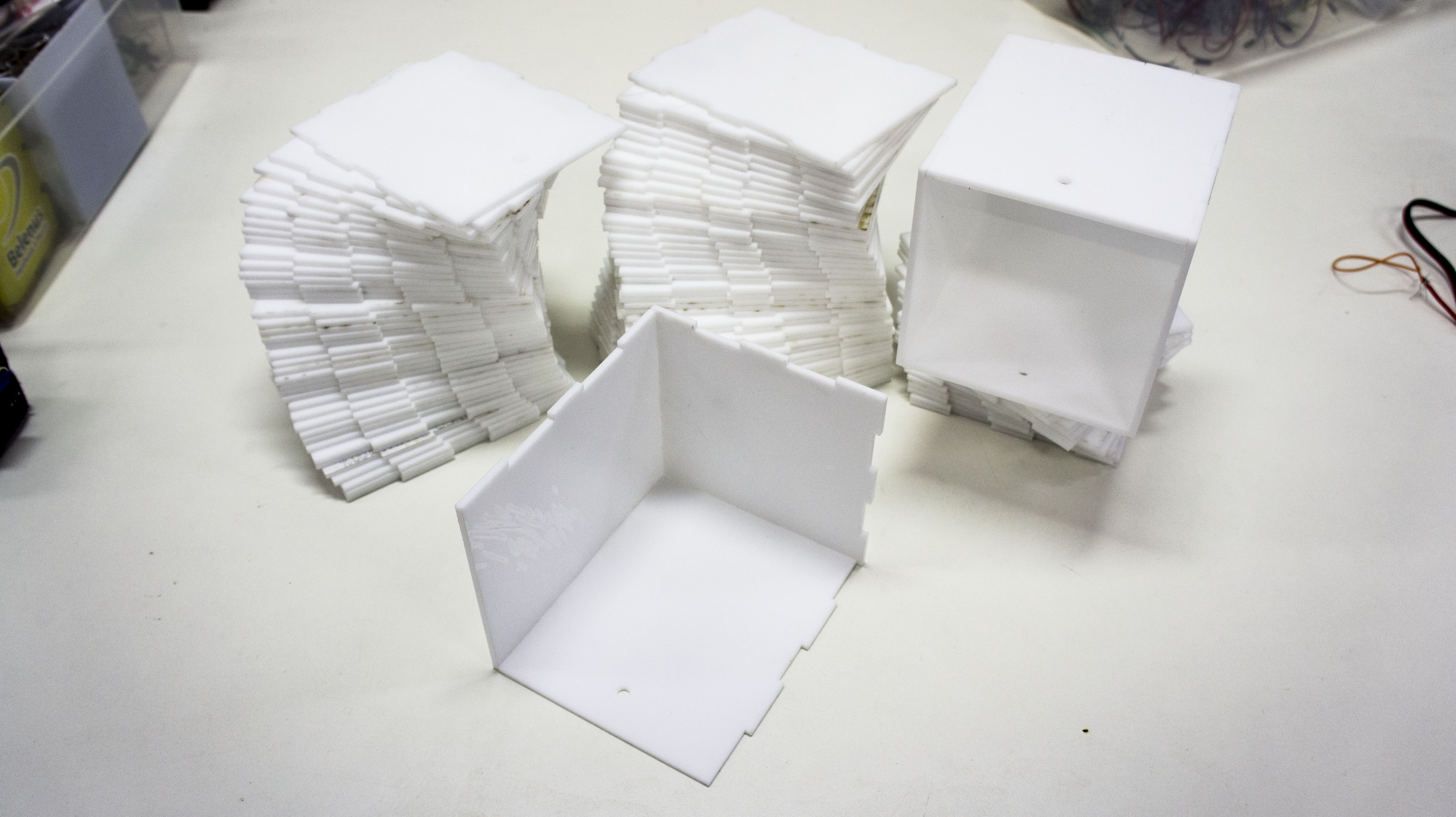
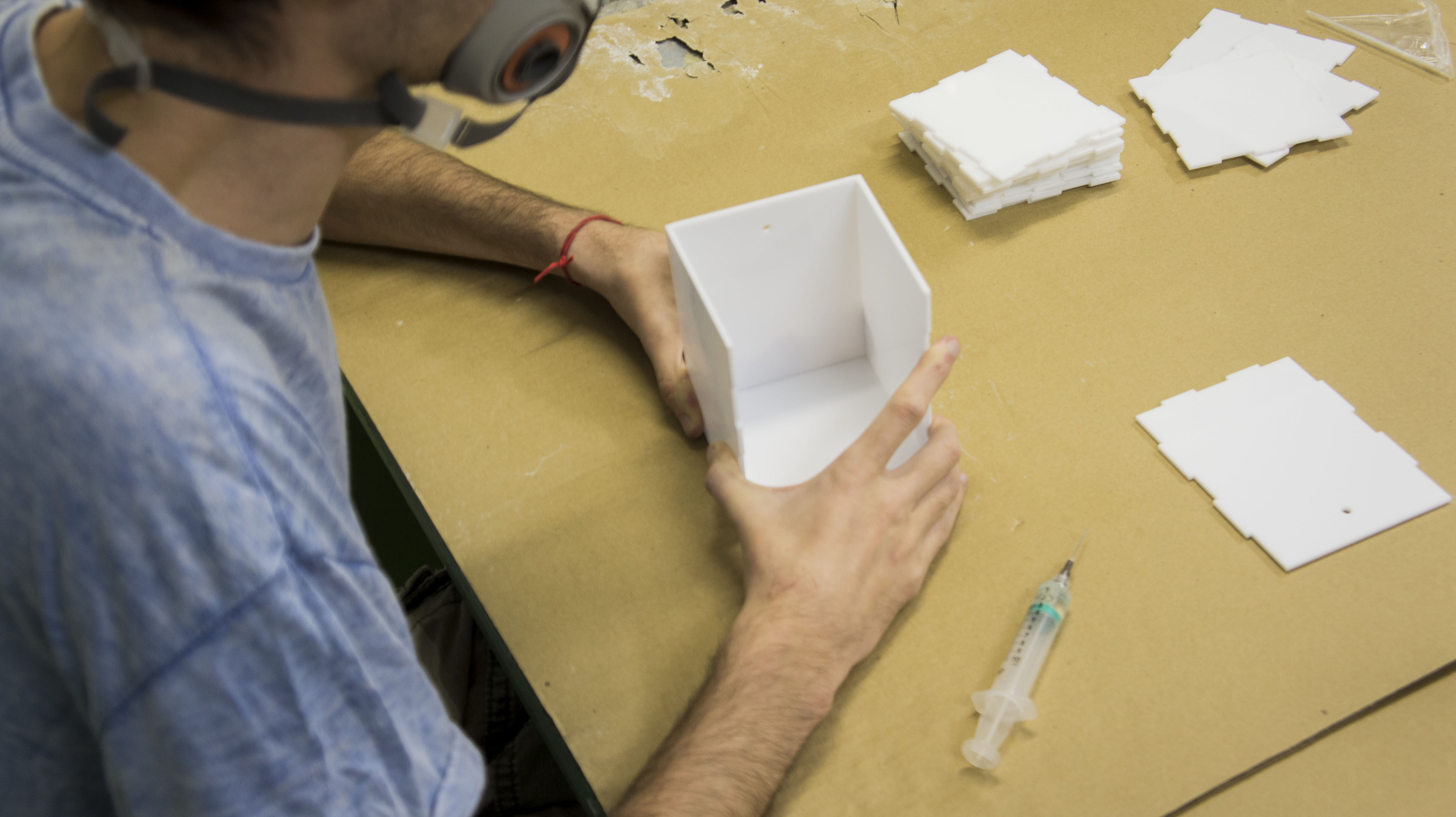
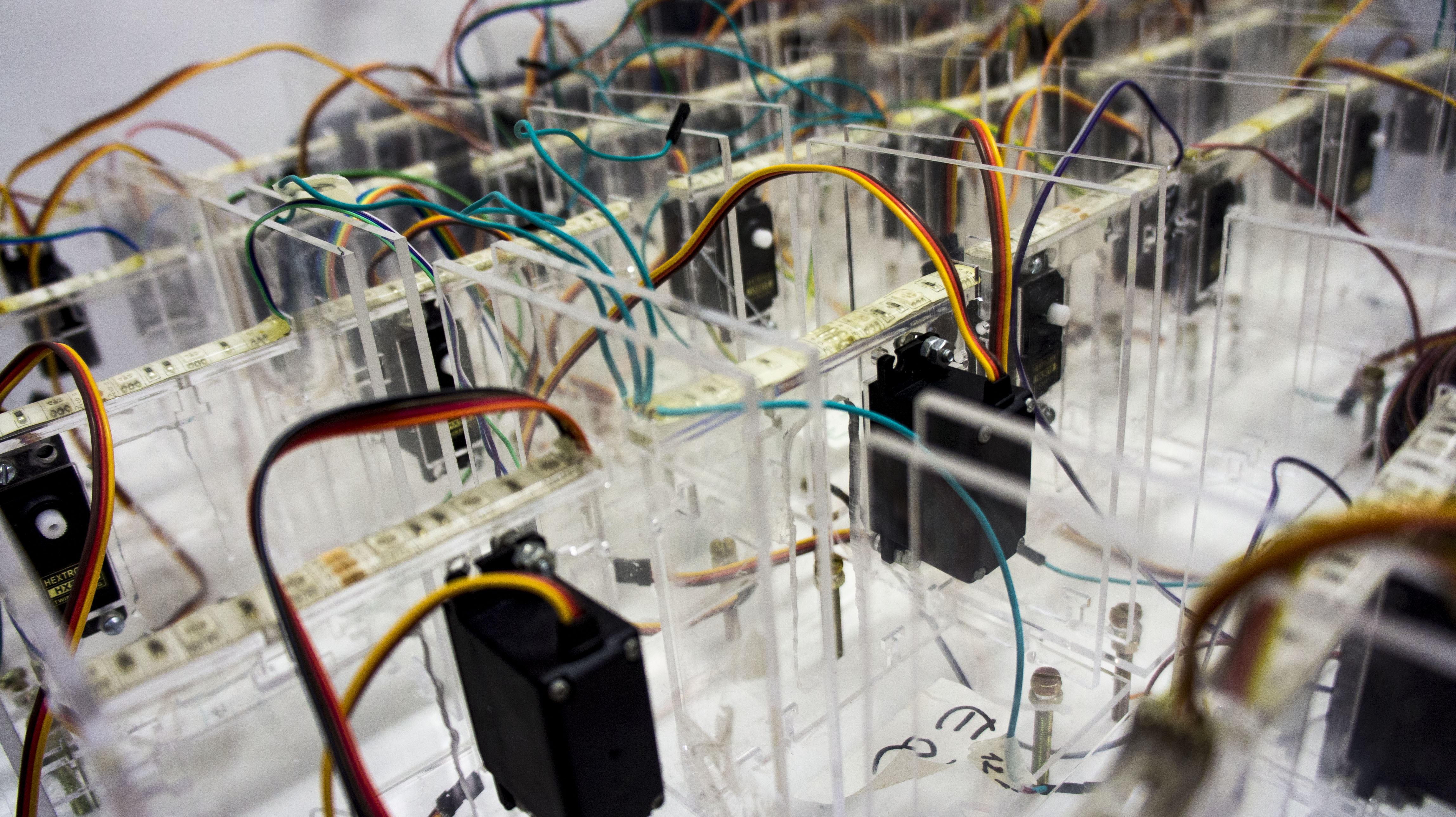
We started the process by joining the acrylic cube faces, laser cut. To fuse the pieces, we used syringes and chloroform, obtaining a clean and precise result.

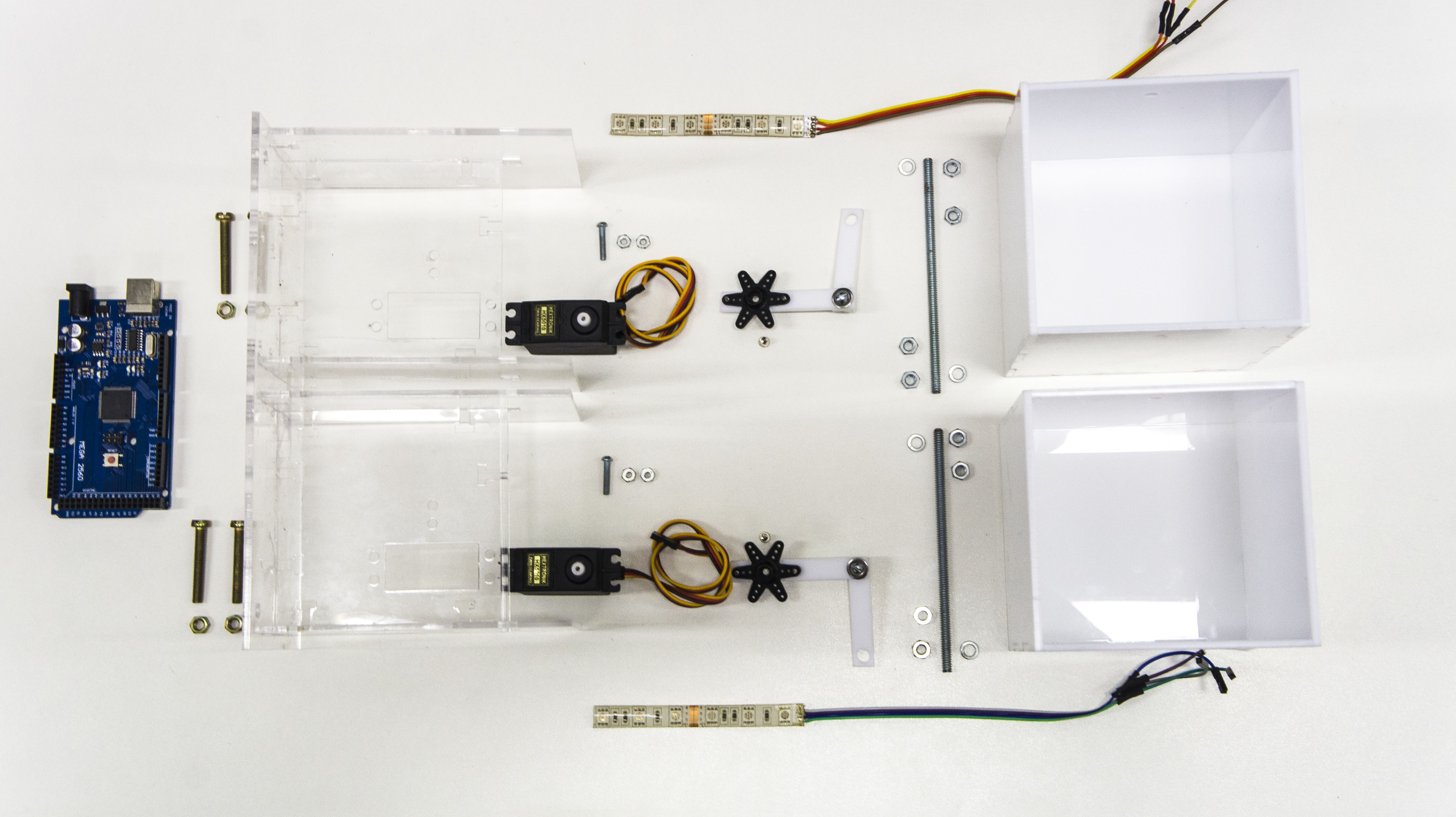
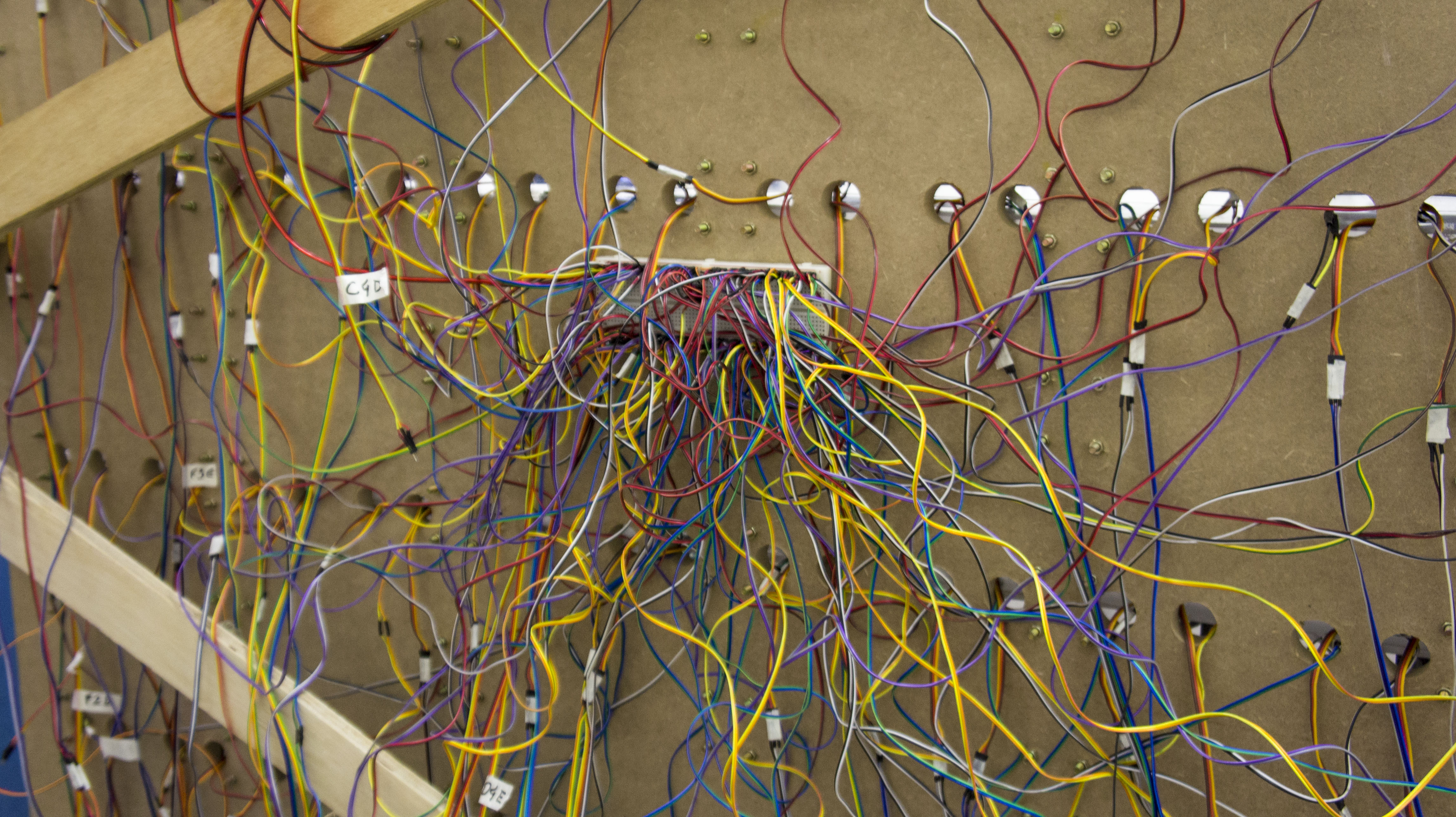
Then we begin to mount the servo motors and LEDs inside each box. Wires were added later to connect the servos and the leds in an Arduino Mega.
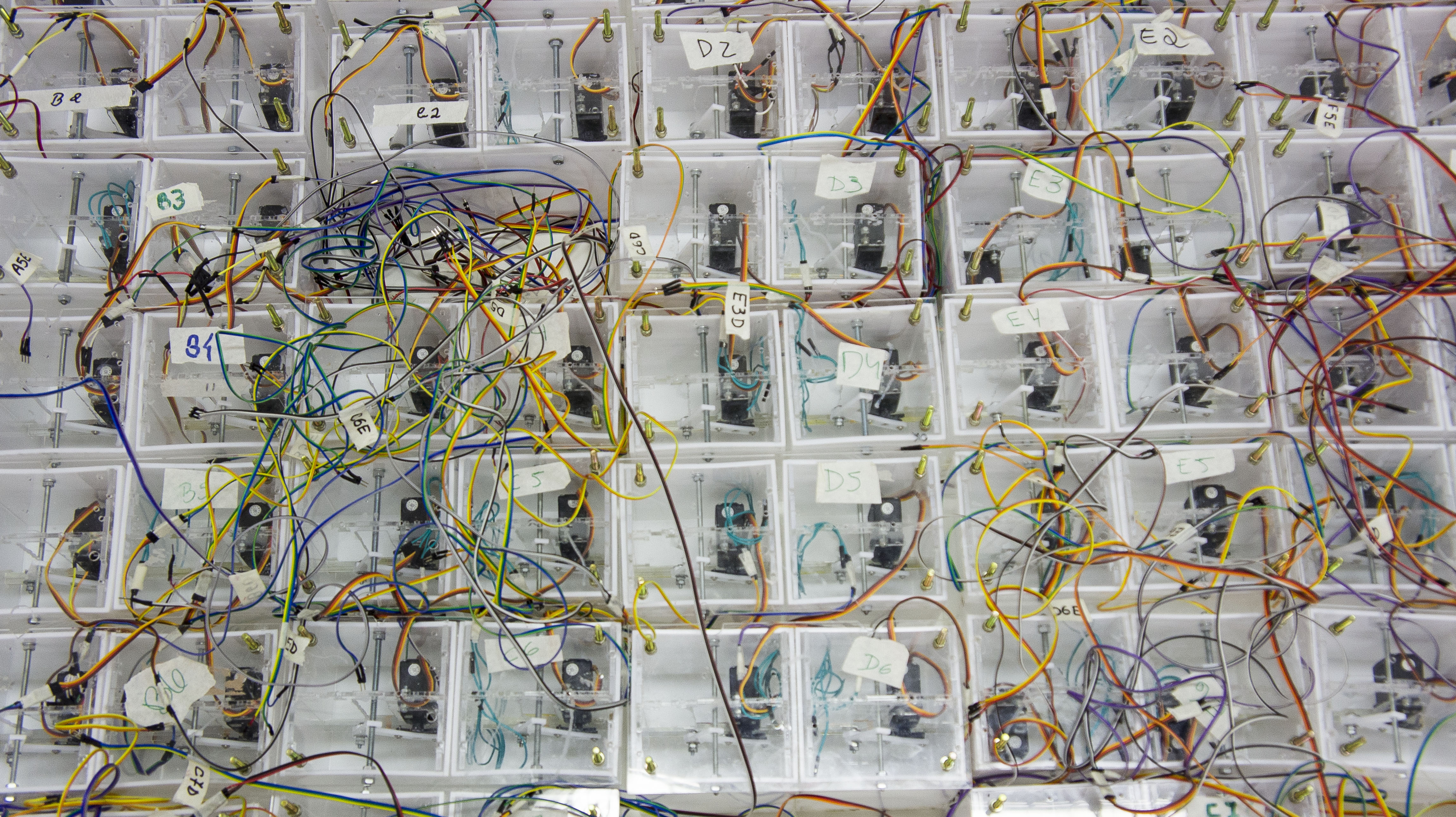
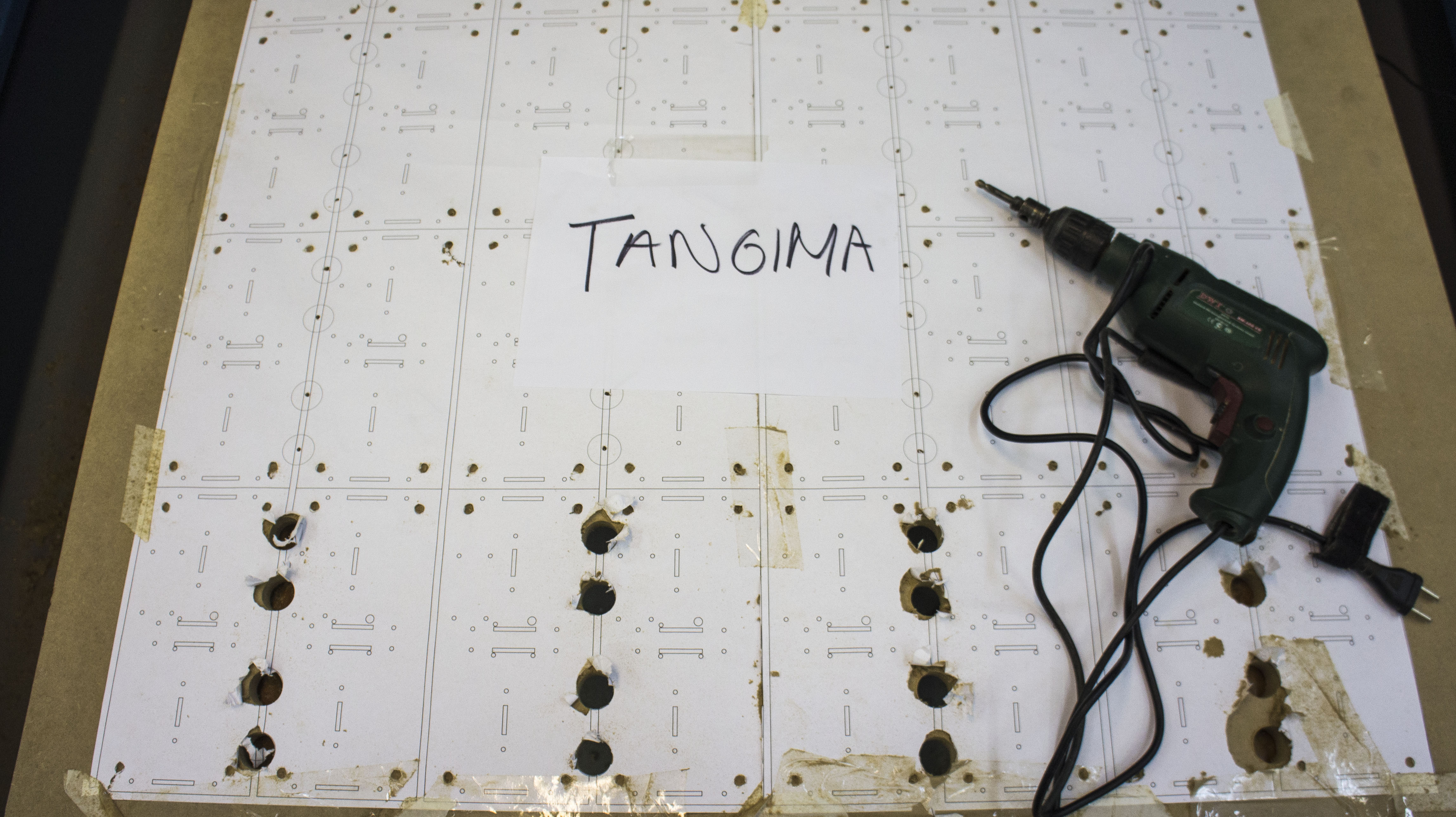
Finally, we made markings on a mdf plate and drilled the holes through which the wires and brackets would pass to the boxes. After this process, we assemble the entire structure on the board.


Final result
The project was exhibited at the Carioca Design Center at the end of 2016.